MLP Training (CPU)#
This tutorial demonstrates training a Multi-Layer Perceptron using three different execution modes in Nabla:
🐢 Eager Mode - Direct execution of each operation, best for debugging
🏃 Dynamic JIT (nabla.djit) - Deferred execution, can handle data-dependent cond. statements in a program
🚀 Static JIT (nabla.jit) - Maximum performance, assumes static programs
Learning Goal: Understand the performance trade-offs and when to use each mode.
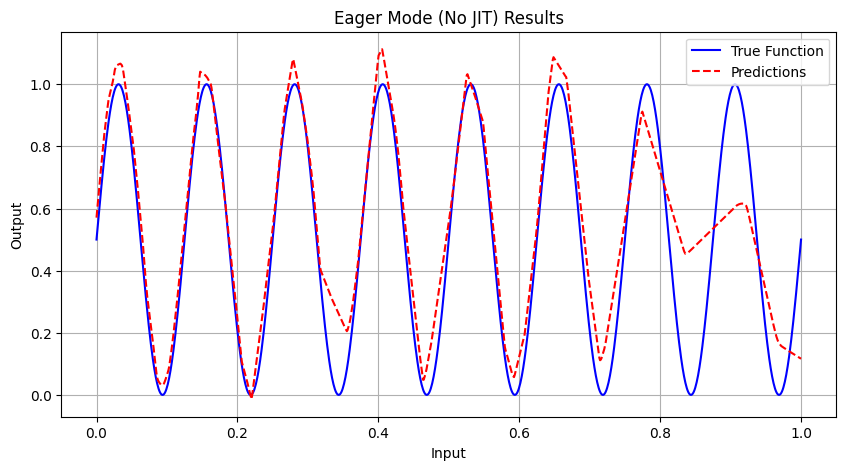
Problem: Train an MLP to learn f(x) = sin(8 * 2π * x) / 2 + 0.5 - a complex 8-period sine function.
[1]:
# Installation
import sys
IN_COLAB = "google.colab" in sys.modules
try:
import nabla as nb
except ImportError:
import subprocess
subprocess.run(
[
sys.executable,
"-m",
"pip",
"install",
"modular",
"--extra-index-url",
"https://download.pytorch.org/whl/cpu",
"--index-url",
"https://dl.modular.com/public/nightly/python/simple/",
],
check=True,
)
subprocess.run(
[sys.executable, "-m", "pip", "install", "nabla-ml", "--upgrade"], check=True
)
import nabla as nb
# Import other required libraries
import matplotlib.pyplot as plt
import numpy as np
print(
f"🎉 Nabla is ready! Running on Python {sys.version_info.major}.{sys.version_info.minor}"
)
🎉 Nabla is ready! Running on Python 3.12
[3]:
# Configuration parameters
BATCH_SIZE = 128
LAYERS = [1, 64, 128, 256, 128, 64, 1] # MLP architecture
LEARNING_RATE = 0.001
NUM_EPOCHS = 5000
PRINT_INTERVAL = 1000
SIN_PERIODS = 8
# Set random seed for reproducibility
GLOBAL_SEED = 42
np.random.seed(GLOBAL_SEED)
2. Core Model and Utility Functions#
Let’s define the essential functions for our neural network and training process.
[4]:
def mlp_forward(x: nb.Array, params: list[nb.Array]) -> nb.Array:
"""Forward pass of the MLP with ReLU activations."""
output = x
for i in range(0, len(params) - 1, 2):
w, b = params[i], params[i + 1]
output = nb.matmul(output, w) + b
if i < len(params) - 2: # No ReLU for the output layer
output = nb.relu(output)
return output
def mean_squared_error(predictions: nb.Array, targets: nb.Array) -> nb.Array:
"""Compute mean squared error loss."""
diff = predictions - targets
squared_errors = diff * diff
batch_size = nb.array(predictions.shape[0], dtype=nb.DType.float32)
return nb.sum(squared_errors) / batch_size
def create_sin_dataset(batch_size: int = BATCH_SIZE) -> tuple[nb.Array, nb.Array]:
"""Generate training data for the sinusoidal function."""
x = nb.rand((batch_size, 1), lower=0.0, upper=1.0, dtype=nb.DType.float32)
targets = nb.sin(SIN_PERIODS * 2.0 * np.pi * x) / 2.0 + 0.5
return x, targets
def initialize_for_complex_function(
layers: list[int], seed: int = GLOBAL_SEED
) -> list[nb.Array]:
"""Initialize weights using He Normal initialization."""
params = []
for i in range(len(layers) - 1):
fan_in, fan_out = layers[i], layers[i + 1]
w = nb.he_normal((fan_in, fan_out), seed=seed)
b = nb.zeros((fan_out,))
params.extend([w, b])
return params
def adamw_step(
params: list[nb.Array],
gradients: list[nb.Array],
m_states: list[nb.Array],
v_states: list[nb.Array],
step: int,
learning_rate: float = LEARNING_RATE,
beta1: float = 0.9,
beta2: float = 0.999,
eps: float = 1e-8,
weight_decay: float = 0.01,
) -> tuple[list[nb.Array], list[nb.Array], list[nb.Array]]:
"""AdamW optimization step with weight decay."""
updated_params, updated_m, updated_v = [], [], []
bc1, bc2 = 1.0 - beta1**step, 1.0 - beta2**step
for param, grad, m, v in zip(params, gradients, m_states, v_states, strict=False):
new_m = beta1 * m + (1.0 - beta1) * grad
new_v = beta2 * v + (1.0 - beta2) * (grad * grad)
m_corrected = new_m / bc1
v_corrected = new_v / bc2
update = m_corrected / (v_corrected**0.5 + eps) + weight_decay * param
new_param = param - learning_rate * update
updated_params.append(new_param)
updated_m.append(new_m)
updated_v.append(new_v)
return updated_params, updated_m, updated_v
def init_adamw_state(params: list[nb.Array]) -> tuple[list[nb.Array], list[nb.Array]]:
"""Initialize AdamW optimizer states."""
m_states = [nb.zeros_like(param) for param in params]
v_states = [nb.zeros_like(param) for param in params]
return m_states, v_states
def learning_rate_schedule(
epoch: int,
initial_lr: float = LEARNING_RATE,
decay_factor: float = 0.95,
decay_every: int = 1000,
) -> float:
"""Learning rate decay schedule."""
return initial_lr * (decay_factor ** (epoch // decay_every))
def _loss_fn(x: nb.Array, targets: nb.Array, params: list[nb.Array]) -> nb.Array:
"""Helper function for loss computation used with value_and_grad."""
return mean_squared_error(mlp_forward(x, params), targets)
def compute_predictions_and_loss(
x_test: nb.Array, targets_test: nb.Array, params: list[nb.Array]
) -> tuple[nb.Array, nb.Array]:
"""Compute predictions and loss for evaluation."""
predictions_test = mlp_forward(x_test, params)
test_loss = mean_squared_error(predictions_test, targets_test)
return predictions_test, test_loss
3. Training Step Implementations#
Now let’s implement the training step for each execution mode. The key difference is how Nabla compiles and executes the computational graph.
About value_and_grad#
The value_and_grad function is a fundamental transformation in Nabla (similar to JAX). It takes a function and returns a new function that computes both the original function’s value and its gradient with respect to specified arguments. This is crucial for training neural networks as it allows us to compute the loss and its gradients in a single pass.
[5]:
def train_step_no_jit(
x: nb.Array,
targets: nb.Array,
params: list[nb.Array],
m_states: list[nb.Array],
v_states: list[nb.Array],
step: int,
learning_rate: float,
) -> tuple[list[nb.Array], list[nb.Array], list[nb.Array], nb.Array]:
"""Training step in eager mode (no JIT compilation)."""
# Compute loss and gradients using value_and_grad
loss_value, param_gradients = nb.value_and_grad(
lambda *p: _loss_fn(x, targets, p), argnums=list(range(len(params)))
)(*params)
# Update parameters using AdamW
updated_params, updated_m, updated_v = adamw_step(
params, param_gradients, m_states, v_states, step, learning_rate
)
return updated_params, updated_m, updated_v, loss_value
@nb.djit
def train_step_djit(
x: nb.Array,
targets: nb.Array,
params: list[nb.Array],
m_states: list[nb.Array],
v_states: list[nb.Array],
step: int,
learning_rate: float,
) -> tuple[list[nb.Array], list[nb.Array], list[nb.Array], nb.Array]:
"""Training step with dynamic JIT compilation."""
loss_value, param_gradients = nb.value_and_grad(
lambda *p: _loss_fn(x, targets, p), argnums=list(range(len(params)))
)(*params)
updated_params, updated_m, updated_v = adamw_step(
params, param_gradients, m_states, v_states, step, learning_rate
)
return updated_params, updated_m, updated_v, loss_value
@nb.jit
def train_step_jit(
x: nb.Array,
targets: nb.Array,
params: list[nb.Array],
m_states: list[nb.Array],
v_states: list[nb.Array],
step: int,
learning_rate: float,
) -> tuple[list[nb.Array], list[nb.Array], list[nb.Array], nb.Array]:
"""Training step with static JIT compilation."""
loss_value, param_gradients = nb.value_and_grad(
lambda *p: _loss_fn(x, targets, p), argnums=list(range(len(params)))
)(*params)
updated_params, updated_m, updated_v = adamw_step(
params, param_gradients, m_states, v_states, step, learning_rate
)
return updated_params, updated_m, updated_v, loss_value
4. Experiment Runner#
Let’s create a function to run our training experiments and collect results.
[6]:
def run_training_experiment(train_step_func, jit_mode: str):
"""Run training experiment and collect results."""
print(f"\n{'=' * 50}\nStarting Training with: {jit_mode}\n{'=' * 50}")
print(f"Architecture: {LAYERS}")
print(f"Initial Learning Rate: {LEARNING_RATE}")
# Initialize model and optimizer
params = initialize_for_complex_function(LAYERS, seed=GLOBAL_SEED)
m_states, v_states = init_adamw_state(params)
# Initial evaluation
x_init, targets_init = create_sin_dataset(BATCH_SIZE)
predictions_init = mlp_forward(x_init, params)
initial_loss = mean_squared_error(predictions_init, targets_init).to_numpy().item()
print(f"Initial Loss: {initial_loss:.6f}")
# Training loop
avg_loss, total_time, compile_time = 0.0, 0.0, 0.0
print("Starting training loop...")
for epoch in range(1, NUM_EPOCHS + 1):
epoch_start = time.time()
current_lr = learning_rate_schedule(epoch)
x, targets = create_sin_dataset(BATCH_SIZE)
if "JIT" in jit_mode and epoch == 1:
compile_start = time.time()
updated_params, updated_m, updated_v, loss_value = train_step_func(
x, targets, params, m_states, v_states, epoch, current_lr
)
compile_time = time.time() - compile_start
else:
updated_params, updated_m, updated_v, loss_value = train_step_func(
x, targets, params, m_states, v_states, epoch, current_lr
)
params, m_states, v_states = updated_params, updated_m, updated_v
avg_loss += loss_value.to_numpy().item()
total_time += time.time() - epoch_start
if epoch % PRINT_INTERVAL == 0:
print(f"Epoch {epoch:4d} | Avg Loss: {avg_loss / PRINT_INTERVAL:.6f}")
avg_loss = 0.0
# Final evaluation
x_test = nb.Array.from_numpy(
np.linspace(0, 1, 1000).reshape(-1, 1).astype(np.float32)
)
targets_test = nb.Array.from_numpy(
(np.sin(SIN_PERIODS * 2.0 * np.pi * x_test.to_numpy()) / 2.0 + 0.5).astype(
np.float32
)
)
predictions_test, test_loss = compute_predictions_and_loss(
x_test, targets_test, params
)
final_loss = test_loss.to_numpy().item()
correlation = np.corrcoef(
predictions_test.to_numpy().flatten(), targets_test.to_numpy().flatten()
)[0, 1]
# Plot results
plt.figure(figsize=(10, 5))
plt.plot(
x_test.to_numpy(), targets_test.to_numpy(), label="True Function", color="blue"
)
plt.plot(
x_test.to_numpy(),
predictions_test.to_numpy(),
label="Predictions",
color="red",
linestyle="--",
)
plt.title(f"{jit_mode} Results")
plt.xlabel("Input")
plt.ylabel("Output")
plt.legend()
plt.grid(True)
plt.show()
# Return results
avg_epoch_time = (
(total_time - compile_time) / (NUM_EPOCHS - 1)
if "JIT" in jit_mode
else total_time / NUM_EPOCHS
)
return {
"mode": jit_mode,
"total_time": total_time,
"compile_time": compile_time,
"avg_epoch_time": avg_epoch_time,
"final_loss": final_loss,
"correlation": correlation,
}
5. Run Experiments and Compare Results#
Now let’s run our experiments with different execution modes and compare the results.
[7]:
# Run experiments
results = []
print("\nRunning Eager Mode Experiment...")
results.append(run_training_experiment(train_step_no_jit, "Eager Mode (No JIT)"))
print("\nRunning Dynamic JIT Experiment...")
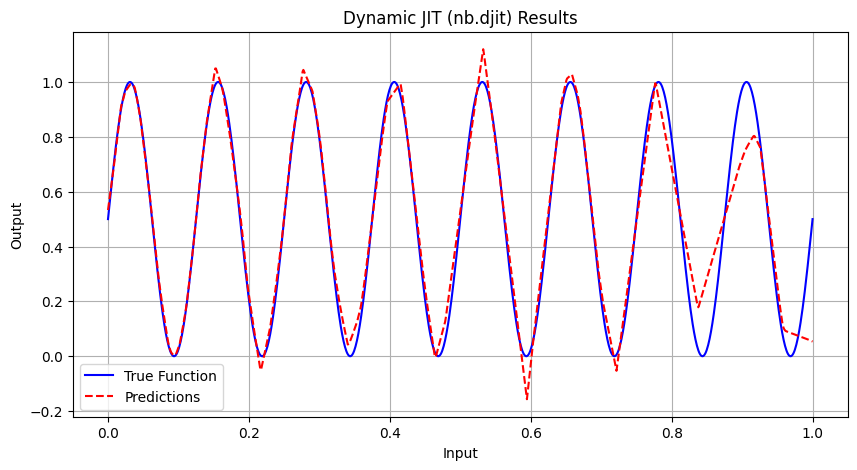
results.append(run_training_experiment(train_step_djit, "Dynamic JIT (nb.djit)"))
print("\nRunning Static JIT Experiment...")
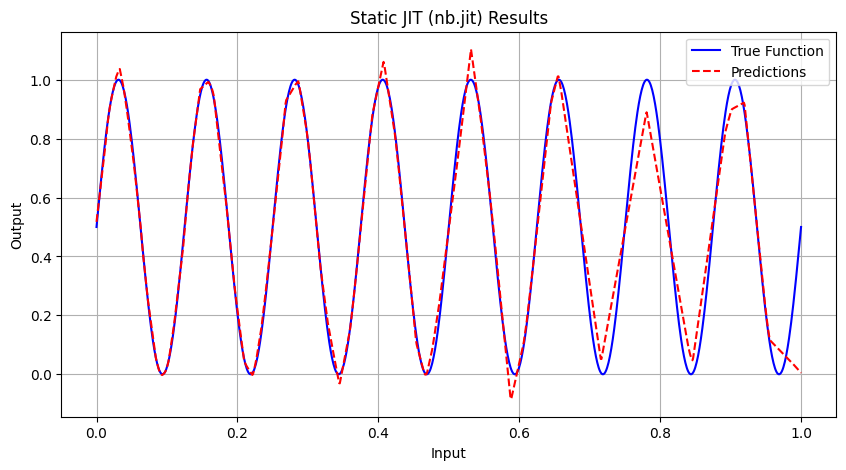
results.append(run_training_experiment(train_step_jit, "Static JIT (nb.jit)"))
# Display results comparison
print("\n\n" + "=" * 80)
print("NABLA JIT PERFORMANCE COMPARISON".center(80))
print("=" * 80)
print(
f"{'Mode':<25} | {'Total Time (s)':<15} | {'Avg Epoch Time (s)':<18} | {'Final Loss':<10} | {'Correlation':<10}"
)
print("-" * 80)
for res in results:
print(
f"{res['mode']:<25} | {res['total_time']:<15.4f} | {res['avg_epoch_time']:<18.6f} | {res['final_loss']:<10.6f} | {res['correlation']:<10.4f}"
)
Running Eager Mode Experiment...
==================================================
Starting Training with: Eager Mode (No JIT)
==================================================
Architecture: [1, 64, 128, 256, 128, 64, 1]
Initial Learning Rate: 0.001
Initial Loss: 1.839083
Starting training loop...
Epoch 1000 | Avg Loss: 0.103540
Epoch 2000 | Avg Loss: 0.078370
Epoch 3000 | Avg Loss: 0.054682
Epoch 4000 | Avg Loss: 0.022529
Epoch 5000 | Avg Loss: 0.014815
Running Dynamic JIT Experiment...
==================================================
Starting Training with: Dynamic JIT (nb.djit)
==================================================
Architecture: [1, 64, 128, 256, 128, 64, 1]
Initial Learning Rate: 0.001
Initial Loss: 1.839083
Starting training loop...
Epoch 1000 | Avg Loss: 0.102841
Epoch 2000 | Avg Loss: 0.076053
Epoch 3000 | Avg Loss: 0.042250
Epoch 4000 | Avg Loss: 0.017627
Epoch 5000 | Avg Loss: 0.007438
Running Static JIT Experiment...
==================================================
Starting Training with: Static JIT (nb.jit)
==================================================
Architecture: [1, 64, 128, 256, 128, 64, 1]
Initial Learning Rate: 0.001
Initial Loss: 1.839083
Starting training loop...
Epoch 1000 | Avg Loss: 0.106225
Epoch 2000 | Avg Loss: 0.087544
Epoch 3000 | Avg Loss: 0.060891
Epoch 4000 | Avg Loss: 0.031402
Epoch 5000 | Avg Loss: 0.013393
================================================================================
NABLA JIT PERFORMANCE COMPARISON
================================================================================
Mode | Total Time (s) | Avg Epoch Time (s) | Final Loss | Correlation
--------------------------------------------------------------------------------
Eager Mode (No JIT) | 25.1912 | 0.005036 | 0.019939 | 0.9313
Dynamic JIT (nb.djit) | 23.8807 | 0.004753 | 0.006162 | 0.9759
Static JIT (nb.jit) | 3.5819 | 0.000688 | 0.004731 | 0.9818
6. Analysis and Conclusions#
Based on the results, we can draw the following conclusions:
Static JIT (
nb.jit) is the fastest after compilationDynamic JIT (
nb.djit) offers a good balance between flexibility and performanceEager mode is the slowest but most flexible for debugging
Recommendations:#
Use
nb.jitfor production training with static graphsUse
nb.djitwhen you need some flexibility in your computation graphUse eager mode for debugging and development
Note
💡 Want to run this yourself?
🚀 Google Colab: No setup required, runs in your browser
📥 Local Jupyter: Download and run with your own Python environment